
 微信二维码
微信二维码 微信二维码
微信二维码自动控制理论(新)
一、计算( 每题参考分值5分 )
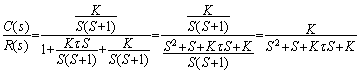
1、已知某单位反馈系统的开环传递函数为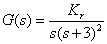 : 1、绘制该系统以根轨迹增益Kr为变量的根轨迹(求出:渐近线、分离点、与虚轴的交点等);2、确定使系统满足
: 1、绘制该系统以根轨迹增益Kr为变量的根轨迹(求出:渐近线、分离点、与虚轴的交点等);2、确定使系统满足 的开环增益的取值范围。正确答案:1、绘制根轨迹 (1)系统有有3个开环极点(起点):0、-3、-3,无开环零点(有限终点); (2)实轴上的轨迹:(-∞,-3)及(-3,0); (3) 3条渐近线:
的开环增益的取值范围。正确答案:1、绘制根轨迹 (1)系统有有3个开环极点(起点):0、-3、-3,无开环零点(有限终点); (2)实轴上的轨迹:(-∞,-3)及(-3,0); (3) 3条渐近线: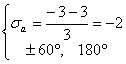 (4) 分离点:
(4) 分离点: 得:
得: 
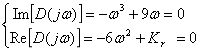
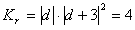 (5)与虚轴交点:
(5)与虚轴交点:
 绘制根轨迹如右图所示。
绘制根轨迹如右图所示。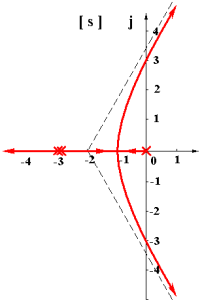 2、开环增益K与根轨迹增益Kr的关系:
2、开环增益K与根轨迹增益Kr的关系: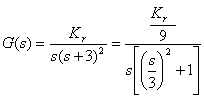 得
得  系统稳定时根轨迹增益Kr的取值范围:
系统稳定时根轨迹增益Kr的取值范围: ,系统稳定且为欠阻尼状态时根轨迹增益Kr的取值范围:
,系统稳定且为欠阻尼状态时根轨迹增益Kr的取值范围: ,系统稳定且为欠阻尼状态时开环增益K的取值范围:
,系统稳定且为欠阻尼状态时开环增益K的取值范围:
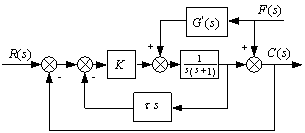
2、系统结构图如下图所示:
(1)写出闭环传递函数![]() 表达式;
表达式;
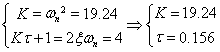
(2)要使系统满足条件:![]() ,
,![]() ,试确定相应的参数
,试确定相应的参数![]() 和
和![]() ;
;
(3)求此时系统的动态性能指标![]() ;
;
(4)![]() 时,求系统由
时,求系统由![]() 产生的稳态误差
产生的稳态误差![]() ;
;
正确答案:
解:(1)
(2)
![]()
(3)![]()
![]()
(4)
![]()
(5)令:
得:![]()
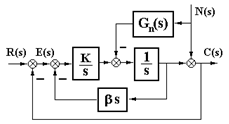
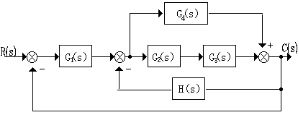
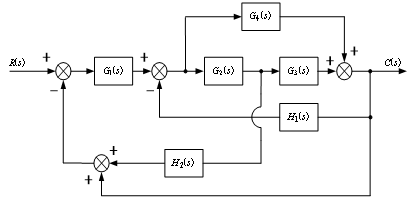
3、某系统的框图如下图所示,
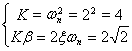
(1)设![]() ,要求系统在
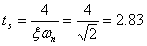
,要求系统在![]() 的作用下,超调量
的作用下,超调量![]() ,调节时间
,调节时间![]() 秒,
秒,
(按![]() 计算),求
计算),求![]() 和
和![]() ;
;
(2)当![]() 时,为使系统输出
时,为使系统输出![]() 不受
不受![]() 的影响,求顺馈环节
的影响,求顺馈环节![]() 的传递函数。
的传递函数。
正确答案:
解:(1)![]() 则,系统输出只受输入信号的影响,系统闭环传递函数可写成:
则,系统输出只受输入信号的影响,系统闭环传递函数可写成:
由![]() ;
;![]()
可以计算出:![]() ;
;![]() ;
;
因此系统的参数可由下式计算:
(2)当![]() 时,从
时,从![]() 到
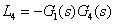
到![]() 的前向通道有两条:
的前向通道有两条:![]() ;
;![]() ;
;
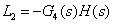
回路有:![]() ;
;![]() ;
;
前向通道![]() 和回路
和回路![]() 互不接触,因此有:
互不接触,因此有:
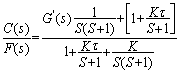
为使![]() 不受的影响,顺馈环节
不受的影响,顺馈环节![]() 的传递函数应该满足:
的传递函数应该满足:
![]()
![]()
![]()
4、写出图2所示系统的传递函数 。
。 正确答案:解:传递函数G(s):根据梅逊公式
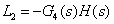
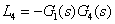
正确答案:解:传递函数G(s):根据梅逊公式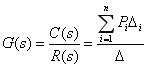 4条回路:
4条回路: ,
,  ,
, ;
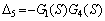
; 无互不接触回路。特征式:
无互不接触回路。特征式: 2条前向通道:
2条前向通道:  ;
;

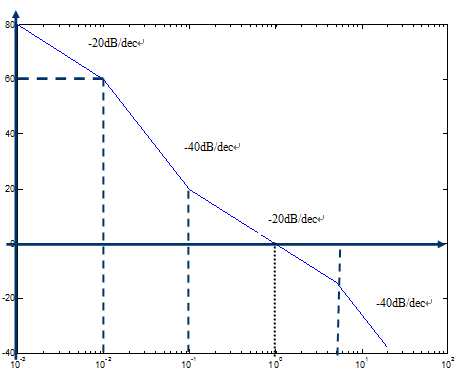
5、设一单位反馈系统对数幅频特性如图所示(最小相位系统)。
(1)写出系统的开环传递函数
(2)判别系统的稳定性
(3)如果系统是稳定的,则求![]() 时的稳态误差。
时的稳态误差。
正确答案:
解:(1)系统的开环传函![]()
(2) 由于是最小相位系统,所以可以通过计算相位裕量γ是否大于零来判断系统的稳定性。
![]()
![]()
系统是稳定的
(3)单位斜坡输入时,系统的稳态误差为 ![]()
6、系统结构图如图4所示: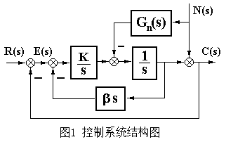 1、写出闭环传递函数
1、写出闭环传递函数 表达式;2、要使系统满足条件:
表达式;2、要使系统满足条件: ,
, ,试确定相应的参数
,试确定相应的参数 和
和 ;3、求此时系统的动态性能指标
;3、求此时系统的动态性能指标 ;4、
;4、 时,求系统由
时,求系统由 产生的稳态误差;正确答案:解:1、
产生的稳态误差;正确答案:解:1、 2、
2、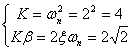
 3、
3、
 4、
4、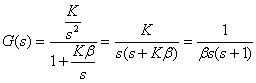

 5、令:
5、令: 得:
得:
7、已知某单位反馈系统的闭环根轨迹图如下图所示
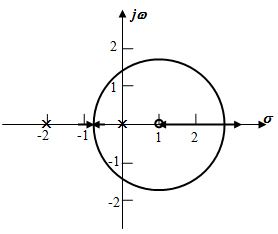
(1)写出该系统以根轨迹增益K*为变量的开环传递函数;
(2)求出分离点坐标,并写出该系统临界阻尼时的闭环传递函数。
正确答案:
解:(1)由图可以看出,系统有1个开环零点为:1;有2个开环极点为:0、-2,而且为零度根轨迹。
由此可得以根轨迹增益K*为变量的开环传函 ![]()
(2)求分离点坐标
![]() ,得
,得 ![]()
分别对应的根轨迹增益为 ![]()
分离点d1为临界阻尼点,d2为不稳定点。
单位反馈系统在d1(临界阻尼点)对应的闭环传递函数为,

8、出下图所示系统的传递函数 和
和 (结构图化简,梅逊公式均可)。
(结构图化简,梅逊公式均可)。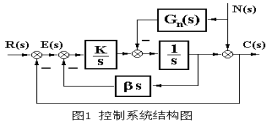 正确答案:解:传递函数G(s):根据梅逊公式
正确答案:解:传递函数G(s):根据梅逊公式 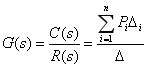 4条回路:
4条回路: ,
,  ,
,
 无互不接触回路。特征式:
无互不接触回路。特征式:  2条前向通道:
2条前向通道:  ;
;

二、论述( 每题参考分值5分 )
9、对于下图所示系统(1)画出相应的信号流图; (2)根据梅逊公式求出系统的传递函数 。
。 正确答案:(1) 信号流图如下所示:
正确答案:(1) 信号流图如下所示: 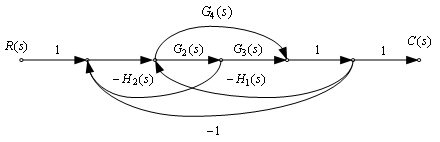 (2)根据系统信号流图可得,2个前向通道
(2)根据系统信号流图可得,2个前向通道
 5个回路
5个回路 ;
; ;
; ;
; ;
; 则根据梅逊公式有:
则根据梅逊公式有: 10、已知系统的结构如图1 所示,其中
10、已知系统的结构如图1 所示,其中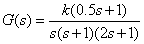 ,输入信号为单位斜坡函数,求系统的稳态误差(6分)。分析能否通过调节增益
,输入信号为单位斜坡函数,求系统的稳态误差(6分)。分析能否通过调节增益 ,使稳态误差小于 0.2 。
,使稳态误差小于 0.2 。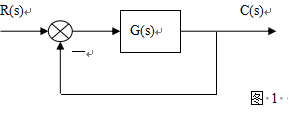 正确答案:解:Ⅰ型系统在跟踪单位斜坡输入信号时,稳态误差为
正确答案:解:Ⅰ型系统在跟踪单位斜坡输入信号时,稳态误差为 而静态速度误差系数
而静态速度误差系数 稳态误差为
稳态误差为  。要使
。要使 必须
必须 ,即
,即 要大于5。但其上限要符合系统稳定性要求。可由劳斯判据决定其上限。 系统的闭环特征方程是
要大于5。但其上限要符合系统稳定性要求。可由劳斯判据决定其上限。 系统的闭环特征方程是 构造劳斯表如下
构造劳斯表如下 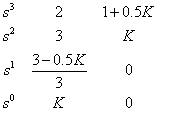 为使首列大于0, 必须
为使首列大于0, 必须 。 综合稳态误差和稳定性要求,当
。 综合稳态误差和稳定性要求,当 时能保证稳态误差小于0.2。
时能保证稳态误差小于0.2。
三、单选( 每题参考分值2.5分 )
11、采用负反馈形式连接后,则 ( )
错误:【D】
12、关于线性系统稳态误差,正确的说法是:( )
错误:【C】
13、若某负反馈控制系统的开环传递函数为 ,则该系统的闭环特征方程为 ( )。
,则该系统的闭环特征方程为 ( )。
错误:【B】
14、关于传递函数,错误的说法是( )
错误:【B】
15、非单位负反馈系统,其前向通道传递函数为G(S),反馈通道传递函数为H(S),当输入信号为R(S),则从输入端定义的误差E(S)为 ( )
错误:【D】
16、下列系统中属于不稳定的系统是( )。
错误:【D】
17、高阶系统的主导闭环极点越靠近虚轴,则系统的( ) 。
错误:【D】
18、下列串联校正装置的传递函数中,能在 处提供最大相位超前角的是 ( )。
处提供最大相位超前角的是 ( )。
错误:【B】
19、系统在 作用下的稳态误差
作用下的稳态误差 ,说明 ( )
,说明 ( )
错误:【A】
20、对于以下情况应绘制0°根轨迹的是( )
错误:【D】
21、已知负反馈系统的开环传递函数为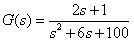 ,则该系统的闭环特征方程为 ( )。
,则该系统的闭环特征方程为 ( )。
错误:【B】
22、二阶系统 时,如果增加,择输出响应的最大超调量将
时,如果增加,择输出响应的最大超调量将
错误:【B】
23、已知下列负反馈系统的开环传递函数,应画零度根轨迹的是 ( )。
错误:【A】
24、一阶系统的闭环极点越靠近S平面原点,则( ) 。
错误:【D】
25、适合应用传递函数描述的系统是( )。
错误:【A】
26、下列哪种措施对提高系统的稳定性没有效果( )。
错误:【A】
27、若系统增加合适的开环零点,则下列说法不正确的是( )。
错误:【B】
28、关于线性系统稳定性的判定,下列观点正确的是 ( )。
错误:【C】
29、关于奈氏判据及其辅助函数 F(s)= 1 + G(s)H(s),错误的说法是 ( )
错误:【A】
30、关于系统零极点位置对系统性能的影响,下列观点中正确的是( )
错误:【A】
31、若某最小相位系统的相角裕度![]() ,则下列说法正确的是( )。
,则下列说法正确的是( )。
错误:【C】
32、关于奈氏判据及其辅助函数 F(s)= 1 + G(s)H(s),错误的说法是( )
错误:【A】
33、关于传递函数,错误的说法是 ( )
错误:【B】
34、已知系统的开环传递函数为 ,则该系统的开环增益为 ( )。
,则该系统的开环增益为 ( )。
错误:【C】
35、下列判别系稳定性的方法中,哪一个是在频域里判别系统稳定性的判据( )
错误:【C】
36、已知负反馈系统的开环传递函数为![]() ,则该系统的闭环特征方程为( )。
,则该系统的闭环特征方程为( )。
错误:【B】
37、已知系统的开环传递函数为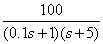 ,则该系统的开环增益为 ( )。
,则该系统的开环增益为 ( )。
错误:【C】
38、系统特征方程为 ,则系统 ( )
,则系统 ( )
错误:【C】
39、开环对数幅频特性的低频段决定了系统的( )。
错误:【A】
40、已知系统的开环传递函数为![]() ,则该系统的开环增益为( )。
,则该系统的开环增益为( )。
错误:【C】
41、开环频域性能指标中的相角裕度![]() 对应时域性能指标( ) 。
对应时域性能指标( ) 。
错误:【A】
42、已知某些系统的开环传递函数如下,属于最小相位系统的是( )
错误:【B】
43、若某系统的根轨迹有两个起点位于原点,则说明该系统( ) 。
错误:【B】
44、若系统增加合适的开环零点,则下列说法不正确的是 ( )。
错误:【B】
45、开环对数幅频特性的低频段决定了系统的( )。
错误:【A】
46、开环频域性能指标中的相角裕度 对应时域性能指标( ) 。
对应时域性能指标( ) 。
错误:【A】
47、若某系统的根轨迹有两个起点位于原点,则说明该系统( ) 。
错误:【B】
48、已知某些系统的开环传递函数如下,属于最小相位系统的是( )
错误:【B】
49、已知单位反馈系统的开环传递函数为![]() ,当输入信号是
,当输入信号是![]() 时,系统的稳态误差是( )
时,系统的稳态误差是( )
错误:【D】
50、对于以下情况应绘制0°根轨迹的是( )
错误:【D】





发表评论